自動運転 - 歩行者や自転車の認識と予測
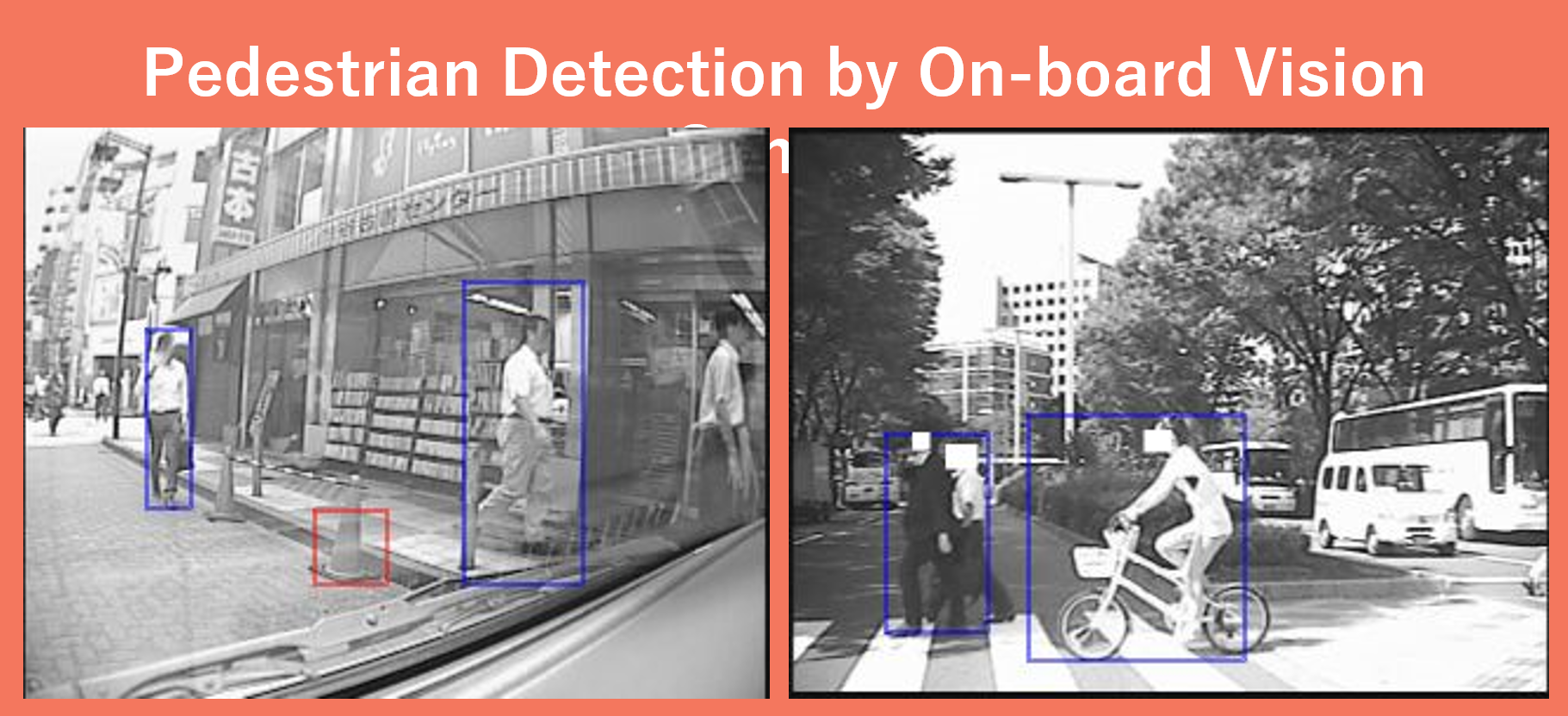
Autonomous Driving - Detection of Pedestrian/Cyclist
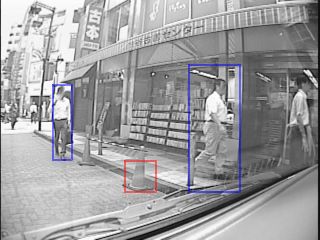
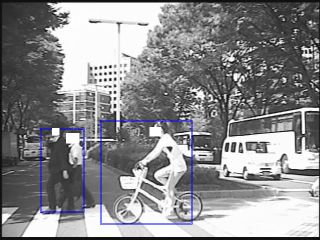
安全運転支援のための路車協調システムは、実証試験が成功し実用化が始まっています。 しかし、路車協調による安全運転支援は、高速道路や大規模交差点等、 路側センサーおよび路車通信装置の設置が可能な場所にサービスが限られています。 一方で、費用対効果や場所の制約から路車協調システムの適用が困難な場所では、車載センサーによる安全運転支援システムが有望視されています。 当研究室では、歩行者・自転車の交通弱者検出のための画像センサーを開発しています。 前景の物体について時空間MRFモデル(ST-MRF)を用いたトラッキングを行っています。 連続するフレームの同一物体に対してHOG特徴量を用いた物体識別アルゴリズムを適用し、歩行者等と電柱・標識、看板等の道路施設物体との識別を行います。 背景となるビル等と前景オブジェクトとの遠近の差から静止している人物や道路施設物体も検出されますが、 物体識別アルゴリズムにより歩行者のみが検出されています。
A general algorithm for pedestrian detection by on-board monocular camera which can be applied to cameras of various view ranges in unified manner. The Spatio-Temporal MRF model (ST-MRF) extracts and tracks foreground objects as pedestrians and non-pedestrian distinguishing from background scenes as buildings by referring to motion difference. During the tracking sequences, cascaded HOG classifiers classify the foreground objects into the two classes of pedestrians and non-pedestrians. Before the classification, geometrical constraints on the relationship between heights and positions of the objects are examined to exclude the non-pedestrian objects. This pre-processing contributed to reducing the processing time of the classification while maintaining the classification accuracy. Due to the benefit of the tracking that the classifier can make decision totally considering Regions of Interest (ROIs) with same ID during consecutive images, this algorithm can operates quite robustly against noises and classification errors at each image frame.
青枠:歩行者 赤枠:非歩行者
Blue: Pedestrian, Red: The others